分类器 vs 分割器
本页面解释 OV20i 系统中可用的两种 AI 模型类型,并帮助您为检测需求选择合适的方法。
OV10i 不具备分割能力。
两种项目类型
OV20i 提供两种不同的 AI 模型方案,以满足不同的检测需求:
- Classification - "Cats vs. Dogs" 方法
- Segmentation - "Where's Waldo?" 方法
分类模型
什么是 Classification?
创建一个 Classification Recipe,训练一个深度学习模型,根据图像的视觉特征将图像分类为不同的类别。
“Cats vs. Dogs” 方法:
Classification 适用于图像可以属于若干离散状态之一的项目(例如 good vs. bad,但类别数量可以任意多)。
Classification 训练模式
Classification 提供两种不同的训练方法:
-
⚡ Fast Classifier
- 目的: 快速设置和测试
- 用例: 快速原型设计与概念验证
- 速度: 训练时间更快
- 准确性: 精度较低
- 生产就绪: ❌ 生产环境不推荐
-
Accurate/Production Classifier
- 目的: 面向生产的检测
- 用例: 最终部署与制造
- 速度: 训练时间较长
- 准确性: 更高的精度
- 生产就绪: ✅ 作为最佳效果的主训练模型
来自生产的分类示例
示例 1:松动螺母检测(OEM 装配)
任务: 识别机械组件中的松动螺母
设置:
- ROI: 围绕螺母区域的矩形
- 类别:
- ✅ Good - 螺母拧紧到位(通过 100%)
- ❌ Defect - 松动螺母(失败 98%)

结果: 二元决策 - 螺母是正确就位还是松动
示例 2:轴座就位验证(OEM 装配)
任务: 识别部分就位的轴
设置:
- ROI: 覆盖轴安装区域的矩形
- 类别:
- ✅ Good - 完全就位轴
- ❌ Defect - 部分就位轴
- ❌ Defect - 完全脱位轴
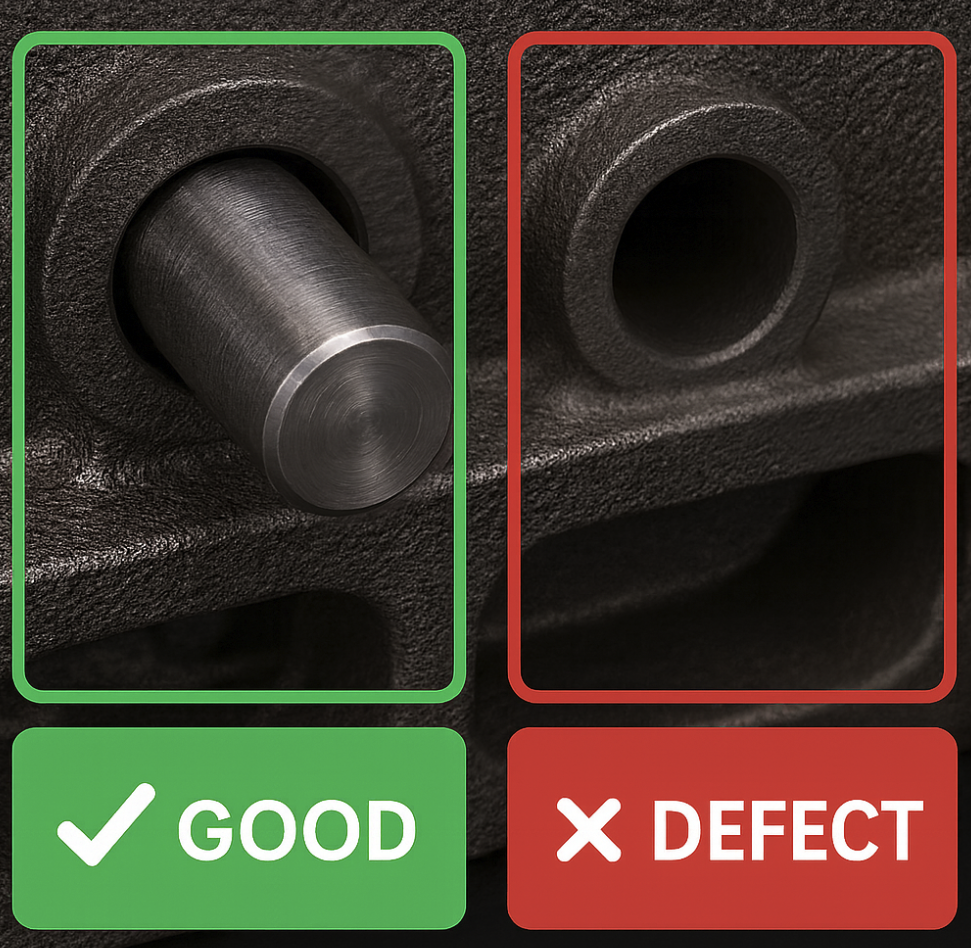
结果: 将组件分类为正确安装或缺陷
示例 3:弯曲针检测(T1 供应商加工)
**任务:检查针脚是否弯曲
设置:
- ROI: 覆盖散热器针阵列的矩形
- 类别:
- ✅ Good - 未损坏的针(直线)
- ❌ Defect - 弯曲/损坏的针(弯曲)

结果: 分类器区分良好针和坏针
分割模型
什么是 Segmentation?
创建一个 Segmentation Recipe,训练一个深度学习模型,对图像进行像素级的类别分割,基于标注的缺陷进行分割。通过在像素级别操作,该工具适用于需要对标签进行更细粒度控制的检测。
“Where's Waldo?” 方法:
Segmentation 最适合缺陷可以呈现多种形状和大小、但出现在多种位置的项目(例如查找划痕和凹痕)。
Segmentation 训练模式
准确/生产专用
- 目的: 面向生产的像素级分析
- 训练: 单一的高精度模式
- 速度: 为实现精确像素分类而需要更长的训练时间
- 准确性: 针对详细缺陷映射具有高精度
- 生产就绪: ✅ 针对制造环境进行了优化
来自生产的分割示例
示例 1:表面缺陷检测(T1 供应商装配)
任务: 识别胶水溢出
设置:
- ROI: 围绕阀体表面的矩形
- 像素类别:
- 胶水(黄像素)
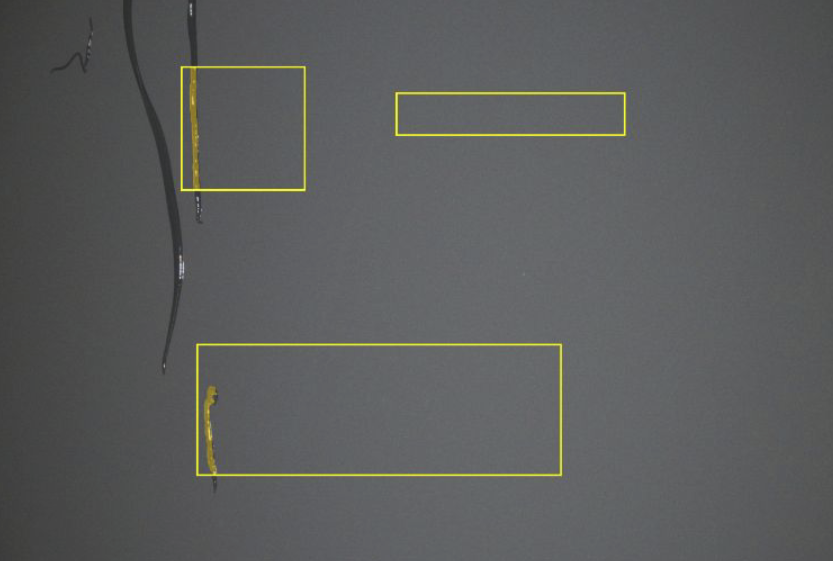
结果: 黄颜色高亮准确显示 AI 模型检测为缺陷的区域,参考图像以原图给出
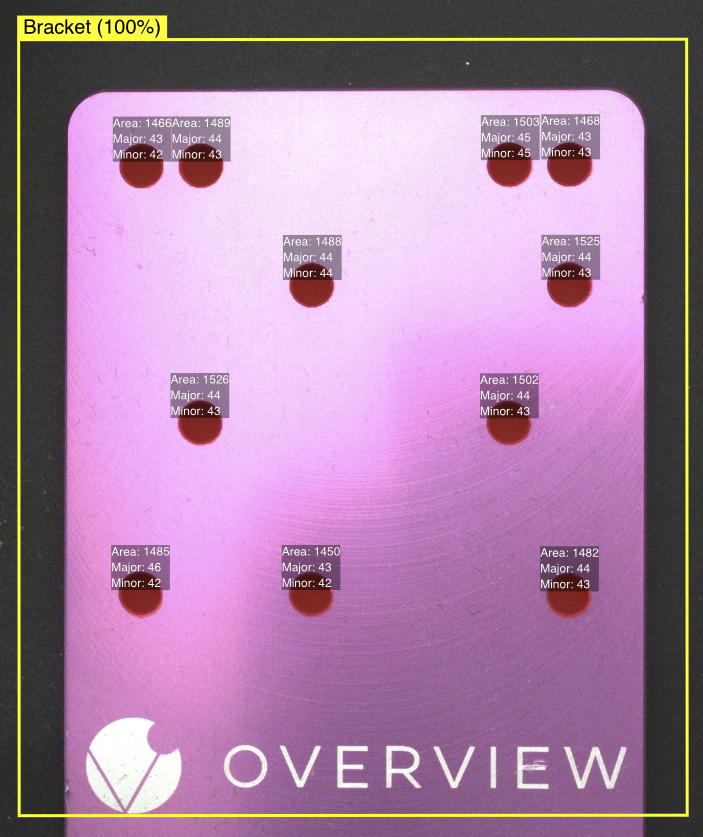
示例 2:缝隙尺寸测量(T1 供应商装配)
任务: 验证检测区域的缝隙是否为正确尺寸
设置:
- ROI: 围绕缝隙区域的矩形
- 测量逻辑: 基于像素面积值的通过条件
- 类别:
- 蓝色像素用于表示距离的示意
- ✅ Good - 面积 <100 像素(通过)
- ❌ Defect - 面积 > 100 像素(失败)

结果: 以像素计数的缝隙大小的精确测量
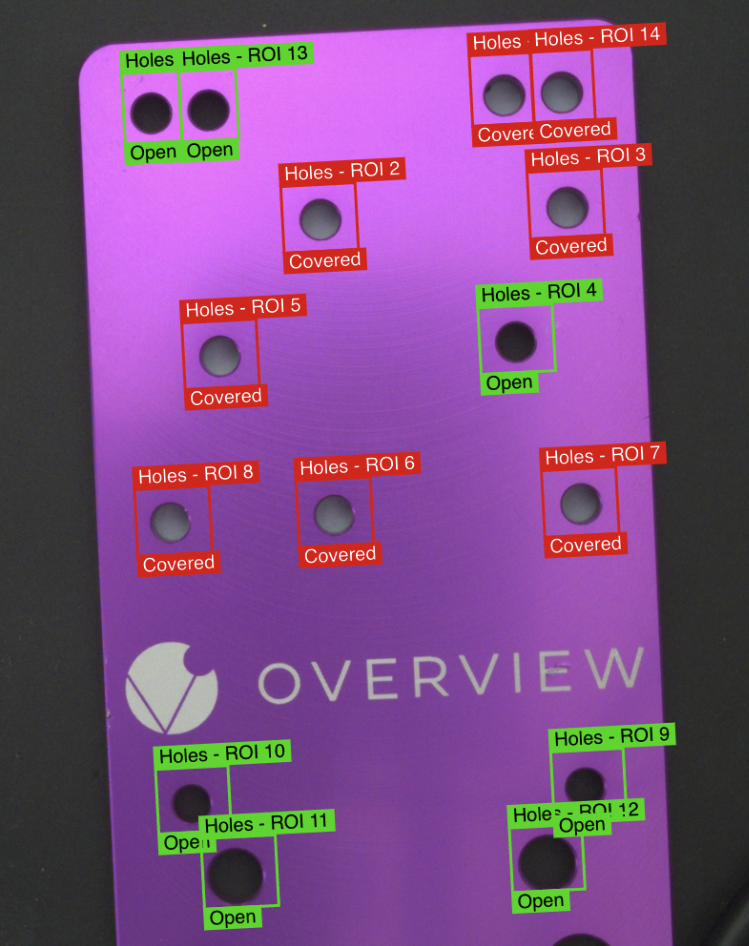
示例 3:油漆飞溅检测
**任务:识别是否存在油漆飞溅
设置:
- ROI: 检测区域的矩形
- 像素类别:
- 黄像素用于表示油漆的外观
结果: 像素级油漆飞溅检测
何时选择每种模型
选择 Classification 的情形:
离散状态决策:
- ✅ 需要简单的良好/不良分类
- ✅ 整个 ROI 可标注为多类之一
- ✅ 整体状态评估足够
- ✅ 预期固定缺陷位置
- ✅ 检测时更快的循环时间可接受
最佳用于:Go/No-Go 决策、元件存在/缺失、整体质量评估
选择 Segmentation 的情形:
可变位置分析:
- ✅ 缺陷可能在检测区域的任意位置
- ✅ 需要测量缺陷的大小或面积
- ✅ 一张图像中可能存在多种缺陷类型
- ✅ 需要精确的位置映射
- ✅ 对生产来说,最快的循环时间至关重要
最佳用途:表面缺陷、缝隙测量、覆盖度验证、可变位置缺陷
性能比较
循环时间性能
| 模型类型 | 检测速度 | 最佳使用场景 |
|---|---|---|
| Segmentation | ⚡ 最快 | 高速生产线 |
| Classification (Accurate) | 较慢 | 质量关键的检测 |
| Classification (Fast) | 中等 | 测试与原型设计 |
Segmentation 模型提供最快的检测循环时间,非常适用于高吞吐量生产环境。
训练模式摘要
Classification 训练选项
- Fast Mode: 仅用于测试的快速设置(不适用于生产)
- Accurate Mode: 生产就绪,精度更高
Segmentation 训练选项
- Accurate Mode Only: 单一的高精度模式,针对生产优化